Chưa có sản phẩm trong giỏ hàng.
Tin tức
Nguyên lý làm việc của động cơ không đồng bộ một pha và ba pha
Động cơ không đồng bộ hay còn gọi là động cơ cảm ứng. Là một động cơ điện xoay chiều chuyển đổi năng lượng điện thành năng lượng cơ học.
Động cơ không đồng bộ được sử dụng rộng rãi trong các ứng dụng khác nhau từ các thiết bị gia dụng cơ bản đến các ngành công nghiệp nặng. Động cơ này có rất nhiều ứng dụng khác nhau và bạn có thể tưởng tượng gần 30% năng lượng điện tạo ra trên toàn cầu được tiêu thụ bởi chính động cơ cảm ứng.

Động cơ tuyệt vời này được phát minh bởi nhà khoa học vĩ đại Nikola Tesla và phát minh này đã thay đổi vĩnh viễn tiến trình của nền văn minh nhân loại.
Tóm Tắt Nội Dung
Nguyên lý làm việc của động cơ không đồng bộ
Để hiểu nguyên lý làm việc của động cơ không đồng bộ, trước tiên chúng ta hãy xem xét một mô phỏng đơn giản như hình dưới.
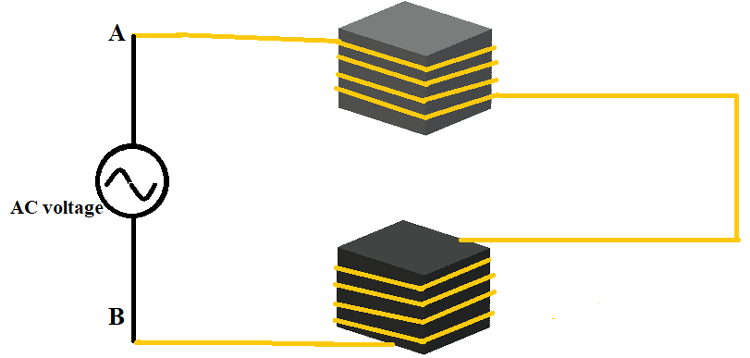
Hai lõi sắt hoặc ferrite có kích thước bằng nhau, được đặt cách nhau một khoảng.
Một dây đồng tráng men được quấn lên hai lõi sắt và có 2 đầu dây đưa ra như hình.
Lõi ở đây hoạt động như một vật để mang và tập trung từ thông do cuộn dây tạo ra trong quá trình hoạt động.
Bây giờ, nếu chúng ta kết nối một nguồn điện áp xoay chiều ở hai đầu của dây đồng.
Trong chu kỳ dương nguồn AC
Trong chu kỳ dương của nguồn điện xoay chiều, dòng điện trong cả hai cuộn dây tăng dần từ 0 đến cực đại và sau đó dần dần trở lại từ cực đại đến 0. Điều này là do theo định luật Ohms, dòng điện trong một dây dẫn tỷ lệ thuận với điện áp đầu cực.
Các cuộn dây được quấn theo cách mà dòng điện trong cả hai cuộn dây chạy theo cùng một hướng, và chúng ta có thể thấy cùng một biểu diễn trong sơ đồ.
Bây giờ chúng ta hãy nhớ lại định luật Lenz mà chúng ta đã học. Theo định luật Lenz, “một dây dẫn mang dòng điện sẽ tạo ra một từ tính lấp đầy xung quanh bề mặt của nó”.
Và nếu chúng ta áp dụng định luật này, thì từ trường sẽ được tạo ra bởi mỗi vòng trong cả hai cuộn dây. Nếu chúng ta thêm từ thông được tạo ra bởi toàn bộ cuộn dây, thì nó sẽ nhận được một giá trị đáng kể. Toàn bộ thông lượng này sẽ xuất hiện trên lõi sắt khi cuộn dây được quấn trên thân lõi.
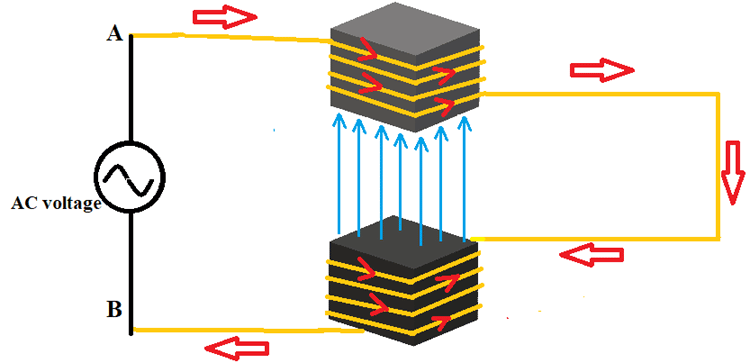
Ở đây bạn có thể thấy các đường sức từ tập trung vào lõi sắt và chuyển động của nó qua khe hở không khí.
Cường độ từ thông này tỷ lệ thuận với dòng điện chạy trong cuộn dây quấn trên cả hai thân sắt. Vì vậy, trong nửa chu kỳ dương, từ thông chuyển từ 0 sang cực đại và sau đó giảm dần từ cực đại sang 0. Khi chu kỳ dương hoàn thành cường độ từ trường tại khe hở không khí cũng bằng không và sau đó, chúng ta sẽ có chu kỳ âm.
Trong chu kỳ âm nguồn AC
Trong chu kỳ âm của điện áp hình sin này, điện áp dương tại điểm B, sẽ dần dần đi từ 0 đến cực đại và sau đó trở về 0. Như thường lệ, có một dòng điện và chúng ta có thể thấy hướng của dòng điện này trong các cuộn dây trong hình dưới đây.
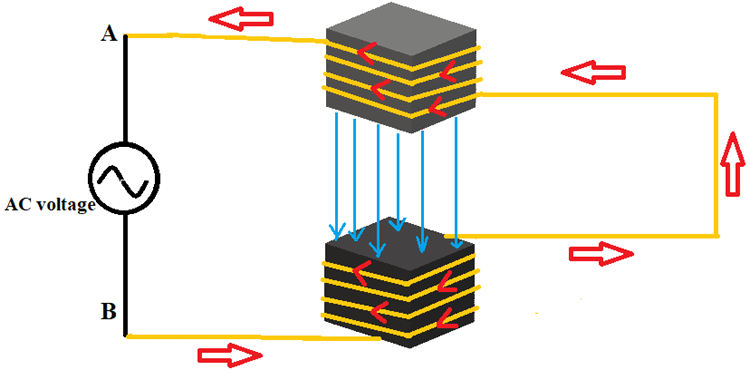
Vì dòng điện tỷ lệ tuyến tính với điện áp, cường độ của nó trong cả hai cuộn dây tăng dần từ 0 đến cực đại và sau đó giảm từ cực đại xuống 0.
Theo định luật Lenz, thì một từ trường sẽ xuất hiện xung quanh các cuộn dây tương tự như trong chu kỳ dương. Từ trường này sẽ được tập trung tại trung tâm của lõi ferrite như trong hình. Vì cường độ từ thông tỷ lệ thuận với dòng chảy trong cuộn dây trên cả hai lõi sắt, từ thông này cũng sẽ đi từ 0 đến cực đại và sau đó giảm dần xuống 0 theo cường độ dòng điện. Mặc dù giống như một chu kỳ dương, nhưng có một sự khác biệt, đó là hướng của các đường sức từ. Bạn có thể quan sát sự khác biệt này theo hướng thông lượng trên sơ đồ.
Quá trình này cứ lặp lại liên tục, từ trường ở trung tâm trên lõi sắt cũng liên tục thay đổi cả về cường độ và hướng.
Có một số kết luận:
- Từ trường tập trung ở trung tâm của lõi sắt.
- Cường độ từ trường tại khe hở không khí thay đổi theo cả cường độ và hướng.
- Từ trường theo dạng sóng điện áp hình sin AC.
Định luật cảm ứng điện từ của Faraday
Chúng ta sẽ cùng nhau ôn lại định luật này vì động cơ không đồng bộ hoạt động theo nguyên tắc cảm ứng điện từ của Faraday. Chúng ta hãy xem xét mô phỏng dưới đây.

Một dây dẫn được định hình thành một hình vuông với cả hai đầu được ngắn mạch. Và một thanh kim loại được cố định làm trục rôto ở trung tâm của hình vuông này. Rôto được đặt ở trung tâm của khe hở không khí.
Theo định luật cảm ứng điện từ của Faraday, “khi một từ trường khác nhau cắt một dây dẫn kim loại, thì EMF hoặc điện áp được cảm ứng trong dây dẫn”
Bây giờ, chúng ta hãy áp dụng luật này để hiểu hoạt động của động cơ cảm ứng:
Theo định luật, một EMF sẽ được cảm ứng trong dây dẫn rôto được đặt ở trung tâm do từ trường thay đổi mà nó trải qua. Do EMF cảm ứng này và dây dẫn bị ngắn mạch, một dòng điện được truyền trong toàn bộ vòng lặp như trong hình.
Theo định luật Lenz, một dây dẫn mang dòng điện tạo ra một từ trường xung quanh nó có cường độ tỷ lệ thuận với cường độ dòng điện.
Hoạt động của động cơ không đồng bộ
Vì định luật là phổ quát nên vòng dây dẫn của rôto cũng phải tạo ra từ trường vì dòng điện chạy qua nó vì cảm ứng điện từ.
Nếu chúng ta gọi từ trường được tạo ra bởi cuộn dây stato và lõi sắt là từ thông chính hoặc từ thông Stato. Sau đó, chúng ta có thể gọi từ trường được tạo ra bởi vòng dây dẫn của rôto là từ thông rôto.
Do sự tương tác giữa từ thông chính và từ thông rôto, một lực tác động lên rôto. Lực này cố gắng chống lại cảm ứng EMF vào rôto bằng cách điều chỉnh vị trí của rôto. Do đó chúng sẽ chuyển động ở vị trí trục tại thời điểm đó. Bây giờ từ trường liên tục thay đổi vì điện áp xoay chiều, lực cũng tiếp tục điều chỉnh vị trí rôto liên tục mà không dừng lại.
Vì vậy, rôto tiếp tục quay vì điện áp xoay chiều và do đó chúng ta có đầu ra cơ học tại trục của rôto.
Đó cũng là lý do động cơ này được gọi là động cơ cảm ứng.
Tiếp theo đây, chúng ta sẽ đi sâu vào tìm hiểu 2 loại động cơ không đồng bộ phổ biến nhé!
Động cơ không đồng bộ một pha
Động cơ cảm ứng hoạt động trên nguồn điện xoay chiều một pha được gọi là động cơ không đồng bộ một pha.
Nguồn điện có sẵn cho chúng ta ở nhà là nguồn điện một pha 240V/50Hz và động cơ cảm ứng mà chúng ta sử dụng trong cuộc sống hàng ngày trong nhà được gọi là động cơ không đồng bộ một pha.
Để hiểu rõ hơn về nguyên lý làm việc của động cơ không đồng bộ một pha, chúng ta hãy xem xét cấu tạo động cơ cảm ứng một pha.
Cấu tạo động cơ không đồng bộ một pha
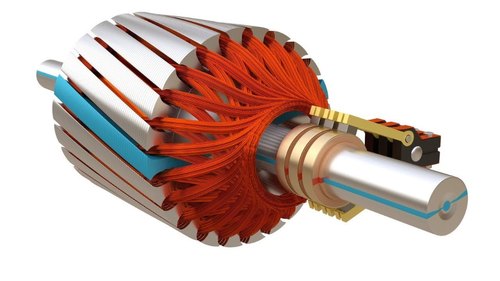
Chúng bao gồm nhiều vòng dây đồng quấn trên trục quay tự do như hình trên.
Cấu tạo rôto này trông giống như một cái lồng sóc và do đó nó được gọi là động cơ không đồng bộ rôto lồng sóc. Các bạn xem hình minh hoạ bên dưới.
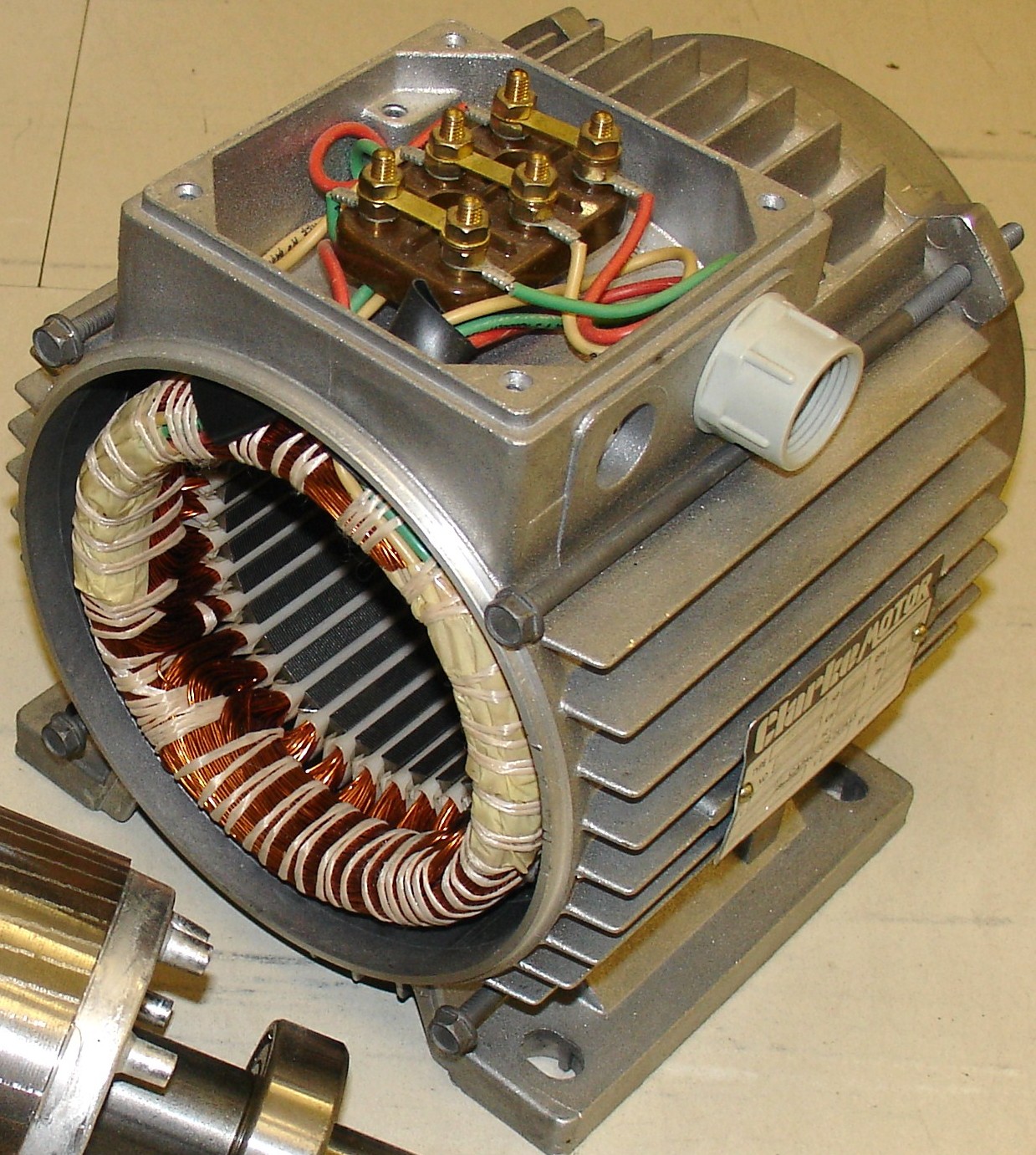
Stato được cấu tạo bao gồm các tấm sắt mỏng xếp chồng lên nhau. Chúng sử dụng một chồng các tấm sắt thay vì một miếng sắt vì lý do để giảm tổn thất sắt. Bằng cách sử dụng phương pháp xếp chồng, chúng sẽ giảm tổn thất điện năng đáng kể trong khi vẫn giữ hiệu suất như cũ.
Nguyên lý hoạt động của động cơ không đồng bộ một pha

Đầu tiên, chúng sẽ được cấp điện áp xoay chiều và dòng điện chạy qua cuộn dây stato ở cả trên và dưới. Một từ trường được tạo ra trên cả cuộn dây trên và dưới.
Các tấm sắt mang từ trường được tạo ra bởi các cuộn dây. Từ trường xen kẽ này được mang bởi lõi sắt được tập trung tại khe hở không khí trung tâm theo cấu trúc thiết kế. Một dòng điện được cảm ứng trong các dây dẫn của rôto. Vì dòng điện đi qua các dây dẫn rôto, từ trường cũng sẽ được tạo ra xung quanh rôto.
Dựa vào sự tương tác giữa từ trường rôto được tạo ra và từ trường của stato, một lực tác động lên rôto.
Lực này di chuyển rôto dọc theo trục và do đó chúng ta sẽ có chuyển động quay.
Vì điện áp thay đổi liên tục điện áp hình sin, rôto cũng quay liên tục dọc theo trục của nó. Do đó, chúng ta sẽ có một đầu ra cơ học liên tục cho điện áp đầu vào một pha.
Sẽ có một cuộn dây phụ cho động cơ một pha để làm cho nó trở thành một động cơ tự khởi động. Cuộn dây phụ này sẽ cung cấp từ trường cần thiết để làm cho rôto di chuyển khi khởi động.
Một ví dụ cho trường hợp này là quạt điện mà chúng ta thấy trong cuộc sống hàng ngày. Đó là một tụ điện khởi động và chạy động cơ cảm ứng với cuộn dây phụ được nối nối tiếp với tụ điện.
Động cơ không đồng bộ ba pha
Động cơ cảm ứng hoạt động trên nguồn điện xoay chiều ba pha được gọi là động cơ không đồng bộ ba pha. Thông thường, động cơ cảm ứng ba pha được sử dụng trong các ngành công nghiệp. Và không phù hợp cho các ứng dụng gia đình.
Để hiểu rõ hơn về nguyên lý làm việc của động cơ cảm ứng ba pha, chúng ta hãy xem xét cấu tạo của chúng.
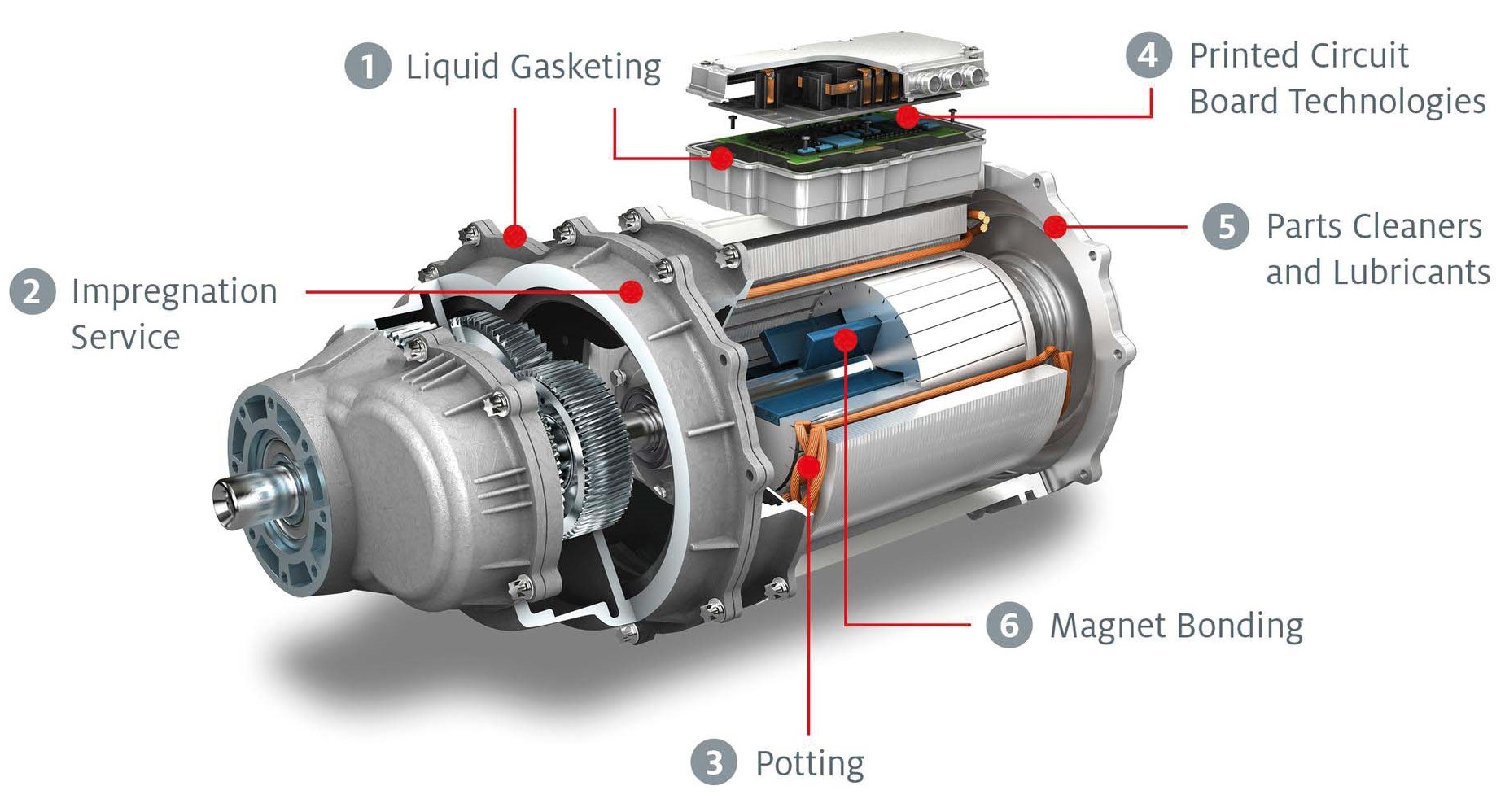
Cấu tạo động cơ cảm ứng ba pha

Những động cơ ba pha này bao gồm một stato và một rôto và giữa đó không có kết nối điện nào tồn tại. Các stato và rôto này được chế tạo với việc sử dụng các vật liệu lõi có từ tính cao để giảm độ trễ và tổn thất dòng điện xoáy.
Khung stato có thể được cấu tạo bằng gang, nhôm hoặc thép cuộn. Khung stato dùng để bảo vệ cơ học cần thiết và hỗ trợ cho lõi stato nhiều lớp, cuộn dây và các sắp xếp khác để thông gió. Stato được quấn với các cuộn dây ba pha được chồng lên nhau với sự dịch chuyển pha 120 độ được lắp vào các rãnh. Sáu đầu của ba cuộn dây được đưa ra và kết nối với hộp điện để các cuộn dây này được đấu nguồn ba pha.
Những cuộn dây này được làm bằng dây đồng cách điện với vecni được lắp vào các lớp có rãnh cách điện. Những cuộn dây này có điện trở cách điện cao và khả năng chống chịu cao với không khí mặn, hơi ẩm, kiềm, dầu và mỡ, … Các cuộn dây này được kết nối trong các kết nối sao hoặc tam giác.
Nguyên lý động cơ không đồng bộ ba pha
Một đầu cuộn dây được nối với đường dây nguồn pha A, trong khi đầu kia được kết nối với trung tính của nguồn điện. Tương tự cho pha B và pha C.

Khi chúng ta cấp nguồn điện cho cuộn dây ba pha của stato thì dòng điện bắt đầu chảy trong cả ba cuộn dây. Khi đó một từ trường sẽ được tạo ra bởi các cuộn dây. Ở đây, cấu trúc của động cơ được thiết kế sao cho từ trường được tập trung vào khe hở không khí ở trung tâm nơi đặt rôto.
Khi có dòng điện dẫn, rôto cũng tạo ra từ trường tương tác với trường stato tại bất kỳ thời điểm nào. Và do sự tương tác này, rôto gặp phải một lực dẫn đến sự quay của động cơ.
Ở đây, từ trường do stato tạo ra thuộc loại quay vì công suất ba pha, không giống như loại động cơ một pha. Và do từ trường quay này, rôto bắt đầu tự quay ngay cả khi không có lực đẩy ban đầu. Điều này làm cho động cơ ba pha trở thành loại tự khởi động và chúng tôi không cần bất kỳ cuộn dây phụ nào cho loại động cơ này.
Ứng dụng của động cơ không đồng bộ một pha
Một số ứng dụng của động cơ không đồng bộ một pha mà chúng ta hay thấy xung quanh chúng ta như:
- Quạt điện trong nhà
- Máy khoan
- Bơm
- Máy nghiền
- Đồ chơi
- Máy hút bụi
- Quạt hút
- Máy nén, máy cạo râu điện…
Ứng dụng của động cơ không đồng bộ ba pha
Các ngành công nghiệp quy mô nhỏ, quy mô trung bình hay quy mô lớn đều sử dụng các động cơ không đồng bộ ba pha này trong các hệ thống sản xuất của họ như:
- Dùng trong vận hành thang máy
- Sử dụng trên các cẩu trục, cần cẩu
- Là động cơ chính của các loại máy mài, máy tiện, máy cắt
- Nhà máy chiết xuất dầu
- Cánh tay robot
- Hệ thống băng tải
- Dùng trong các hệ thống máy nghiền công suất lớn
Qua bài viết này, chúng ta đã hiểu được như thế nào là một động cơ không đồng bộ hay động cơ cảm ứng là gì rồi phải không nào.
Bài viết có tổng hợp một số kiến thức, nếu có sai sót rất mong nhận được những góp ý của bạn đọc.
Hy vọng bài viết sẽ nhận được những lượt like và chia sẽ từ các bạn! Cảm ơn!
Bài viết liên quan
Biến dòng Rogowski RC150 vừa đáp ứng yêu cầu đo dòng từ vài chục ampe cho tới hàng nghìn ampe với độ chính xác cao. Chỉ duy nhất 1 cuộn dây Rogowski có thể đo dòng từ nhỏ tới lớn mà không cần chọn tải tương ứng. Với ngõ ra 100mV/kA tương ứng 1000A cho…
Điện trở sấy là gì. Tại sao điện trở sấy được dùng nhiều trong công nghiệp. Tất cả sẽ được giải đáp trong bài chia sẻ này. Điện trở sấy là một thiết bị được sử dụng để chuyển đổi điện năng thành nhiệt năng. Nói cách khác đây là thiết bị có thể làm…
Cảm biến phát hiện nước ra đời nhằm cảnh báo khi có nước tới một vị trí nào đó trong bồn chứa hoặc phát hiện sự rò rỉ nước. Cảm biến hoạt động như một công tắc, khi không có nước cảm biến sẽ ở trạng thái Tắt – tức là OFF. Khi có nước…